OVS
OVRAS | Open Visualization Space
Caltech's Open Visualization Spaces (OVS) is a simple prototype Virtual Reality environment, built to easily enable researchers around Caltech to 'drop' their data into the system, and seamleslly and quickly be able to easily interact and explore their models.
Furthermore, the space the user is immersed in matches the actual physical space, giving a strong sense of presence and stability needed to enable long time extents of productive exploration/analysis/work.
Interaction can be designed for specfic levels of cognitive involvement. Learned behaviors map well to complex tasks, however they require time and repetition to be mastered. Reflexive and experiential behaviors are not only better suitied for novice users, but should be at the core of most interactions even for expert users in order to maximize efficiency and minimized fatigue.
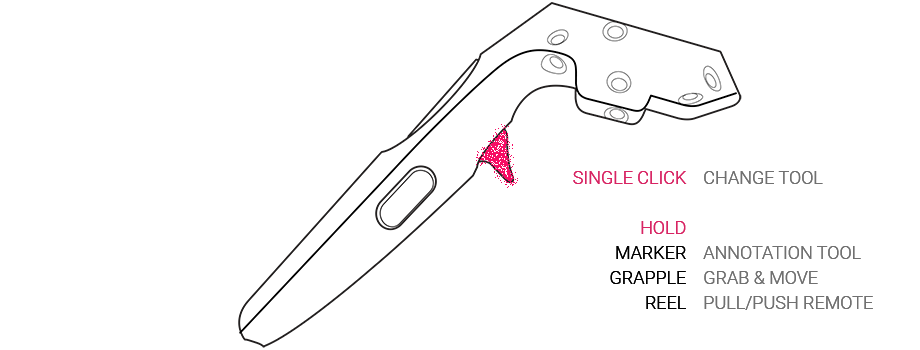
We use this button in two different ways: through a simple click, and through a prolonged hold.
_ Data is automatically placed on a predetermined surface pedestal (or hotspot), resized to fit inside a virtual sphere of 30cm diameter (~1 foot). This is a comfortable size for having the model coexist with a functional workstation, console, or portal/browser.
_ If the model is 'dropped' on the floor, it resizes itself to a fit inside a virtual sphere of 3m diameter (~10 feet). This is a pefect size of collaborative exploration.
_ Finally, if you 'toss' the model out the door, it resizes itself to be 30m tall. A comfortable size to be able to navigate into.

OVS currently supports obj, fbx, csv (connected lines), csv (3d scatter plots), as well as data exported from Google's tiltbrush. We have stablished a clean pipeline between paraview (exporting as ply or csv), blender (exporting as fbx), to OVS (Unity) to be able to quickly adopt a large range of? visualization scenes.
To make data available in OVS, you simply create a folder inside the data filder inside OVS. If your data is
comprised of different segments, you will be able to iterate through each segment inside OVS. You have the option (recommended)
of creating a text meta file (my_data.META.txt, not to be confused with Unity META files) which can
specify information about the dataset, title, source, author; as well as a direct connection to a web portal, or slide deck with
info about each segment. Futthermore,,if you have a special arrangement, or would like all segments to be shown, you can
script that in your META.txt file as well.
OVS was developed in Unity, using C#, with SteamVR asset (based on OpenVR) to
enable support for most virtual reality setups; as well as the Zen Fulcrum Browser.
It currently has been tested on HTC Vive, Samsung Odyssey (Microsoft Mixed Reality), HP Windows Mixed Reality, and
Oculus Rift.
ovs: 01 - WELCOME from ovras caltech on Vimeo.
ovs: 02 - WORMBASE from ovras caltech on Vimeo.

_ voice work : ashwini r nayak
_ jim barry
_ mathieu desbrun
_ matt thomson | CALTECH
_ jim barry | CALTECH
_ mitch guttman | CALTECH
_ andy thompson | CALTECH
_ larry pratt | WOODSHOLE
_ with support from the CENTER for DATA DRIVEN DISCOVERY
_ with support from MOORE-HUFSTEDLER FUND
_ with donations from HTC VIVE
_ with donations from NVIDIA
_ with donations from LOGITECH